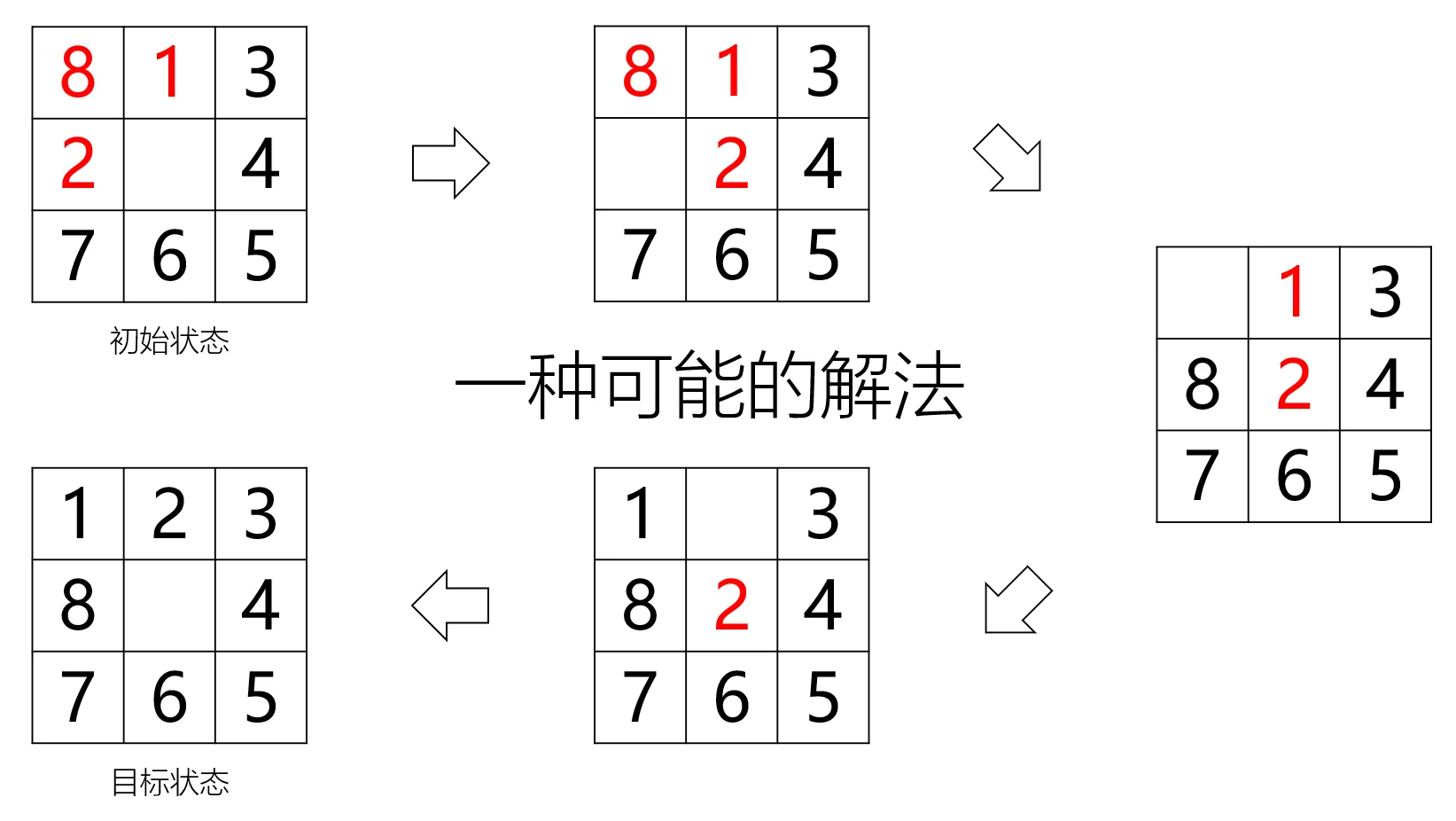
在一个$3 \times 3$的棋盘中,存在编号为1~8或空白的共9种格子。给定一种状态,只允许移动空白格,应该通过何种路径达到目标状态呢?
解决思路
以初始状态为起点进行搜索,应用三种搜索算法:BFS, DFS, A*
判断目标状态是否可达:逆序和奇偶性相同即可达
将每种状态看作一个节点,可以使用盲目搜索算法进行遍历,找到目标状态为止。由于状态空间的庞大(指数级),需要对状态进行查重筛检,这就使得算法的效率不尽人意,因此引入了启发式搜索的A*算法。A*算法使用一个人为定义的估值函数来估算每种状态的“距离”,从而使得不同状态之间的优劣得以区分,把无权图遍历问题转化为了有权图的最短路径问题,搜索效率得到了极大的提升。
由此看来,A*算法最重要的部分便是估值算法的设计。对于八数码问题,经典的两种估值算法分别为:
- 不在正确位置的数字个数
- 每个数字到其正确位置的距离的和,称为曼哈顿距离
相比较而言曼哈顿距离显然包含了更多信息,因此针对本问题我选择了曼哈顿距离作为估值函数。
但是估值终究是估值,A*算法通过距离估值可以少走弯路,尽力而为地找到一个优解,但很可能并不是最优解。
解决方案
- 语言:C++
- 状态节点:用
string类型存储,便于收集与比对,用-表示空白格
- 查重集:
unordered_map(C++11),内部实现为散列表
- 队列与栈:
vector实现,由于需要回溯,便手动操作Push与Pop
- 查找计时:
ctime
- 环境:CLion 2019.3(G++ 8.2.1 x64)
广度优先搜索
BFS访问遍历所有出现的节点,复杂度轻易地达到了指数级。对于变化次数较多的序列,如果使用BFS进行遍历的话,时间复杂度是有些不可接受的。
为了解决以上问题,修改了查重算法,选择使用散列表实现的unordered_map来进行查重,使得该算法的效率得到了极大的提升。
BFS的最大优势是寻找到的解必为最优解之一,因此将BFS得到的深度作为后面的标准深度。
实验记录
| 实验样本 |
深度 |
遍历次数 |
耗时/s |
| “134-85726” |
7 |
166 |
0.03 |
| “5674-8321” |
30 |
181358 |
0.557 |
| “-75168324” |
28 |
179983 |
0.628 |
| “32841-567” |
29 |
180492 |
0.532 |
| “32-418567” |
30 |
181228 |
0.535 |
Source Code
点击展开
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
| #include <iostream>
#include <string>
#include <vector>
#include <ctime>
#include <unordered_map>
using namespace std;
struct node {
string s;
int ptr, pre, depth;
};
node ori;
node des;
vector<node> q;
unordered_map<string, bool> visited;
int times = 0;
void init() {
ori.s = "5674-8321";
for (int i = 0; i < ori.s.length(); i++) {
if (ori.s[i] == '-') {
ori.ptr = i;
break;
}
}
ori.pre = -1;
ori.depth = 0;
des.s = "1238-4765";
des.ptr = 4;
}
bool check(string s) {
int sum = 0;
for (int j = 0; j < s.length(); j++) {
for (int w = 0; w < j; w++) {
if (s[w] != '-' && s[j] != '-' && s[w] > s[j]) {
sum++;
}
}
}
if (sum % 2 == 0) {
return true;
}
else {
return false;
}
}
bool isVisited(node& n) {
if (visited.count(n.s) == 0) {
return false;
}
return true;
}
node swap(node n, const int a, const int b) {
char temp = n.s[a];
n.s[a] = n.s[b];
n.s[b] = temp;
n.ptr = n.s[a] == '-' ? a : b;
n.depth++;
return n;
}
void process(int front, int arg) {
node temp = swap(q[front], q[front].ptr, q[front].ptr + arg);
temp.pre = front;
if (!isVisited(temp)) {
visited[temp.s] = true;
q.push_back(temp);
}
}
void up(int front) {
if (q[front].ptr - 3 >= 0) {
process(front, -3);
}
}
void down(int front) {
if (q[front].ptr + 3 <= 8) {
process(front, 3);
}
}
void left(int front) {
int ptr = q[front].ptr;
if (ptr != 0 && ptr != 3 && ptr != 6) {
process(front, -1);
}
}
void right(int front) {
int ptr = q[front].ptr;
if (ptr != 2 && ptr != 5 && ptr != 8) {
process(front, 1);
}
}
void show(node& n) {
cout << "Found" << endl;
vector<node> ans;
while (n.pre != -1) {
ans.push_back(n);
n = q[n.pre];
}
ans.push_back(ori);
for (auto it = ans.rbegin(); it != ans.rend(); it++) {
cout << "--------- Depth = " << it->depth << endl;
for (int i = 0; i < 3; i++) {
for (int j = 0; j < 3; j++) {
cout << it->s[3 * i + j] << " ";
}
cout << endl;
}
}
cout << "Total times: " << times << endl;
}
int main() {
clock_t start = clock();
init();
if (check(ori.s) != check(des.s)) {
cout << "No solution" << endl;
return 0;
}
q.push_back(ori);
for (int front = 0; front < q.size(); front++) {
times++;
if (q[front].s == des.s) {
show(q[front]);
break;
}
left(front);
up(front);
right(front);
down(front);
}
clock_t end = clock();
cout << "Total cost: " << (double)(end - start) / CLOCKS_PER_SEC << " second" << endl;
return 0;
}
|
深度优先搜索
没有边界终止条件,永远可以往下走
手动设置递归深度,如果没有事先知道递归深度大概范围的话,查找效率是非常低的。
为什么有些解找不到?
把遍历过的所有状态全部置入查重集,会导致这种情况:后面路径的节点已经被前面路径置入查重集,导致前面路径因为递归深度而终止,后面路径因为查重而终止,找不到目标解。当递归深度较深时尤其明显。
遂修正查重算法,只保留这条路自己遍历过的节点,也就是说只保证当前路不走回头路。这样便保证了有解且无需回溯寻找路径。同时查重集最大容量即为递归深度,大大优化了空间与时间复杂度。
递归深度为$N$
则全集查重
$$
最差情况时间复杂度=O(4^{2N})
$$
$$
空间复杂度=O(4^N)
$$
单线查重
$$
最差情况时间复杂度=O(N×4^N)
$$
$$
空间复杂度=O(N)
$$
由于时间复杂度为$O(4^N)$级别,深度较大时需手动设置递归边界,即找到一个解后退出递归。
由此带来了新的问题如下。
有多种路径可以达到目标状态,如何择优?
尝试:
由
- 7 5
1 6 8
3 2 4
到
1 2 3
8 - 4
7 6 5
最大递归深度为30
实验结果:
运行2 ~ 3分钟(约查找$10^{8}$次),共得到12个解,如下:
从结果来看,对于不同的解出现了不同的深度——由此我们得到两点结论:
- 八数码问题的解不是唯一的
- 在深度优先搜索中大部分解往往逼近于递归深度
如果对30层递归深度的全集进行搜索的话,总遍历次数需要达到$4^{30}$,这是非常恐怖的:
$$
4^{30}=1,152,921,504,606,846,976=1.15E18
$$
从理论上要得到所有解并择优需要的时间代价是不可接受的,我们难以得到最理想的答案。
因此,高深度情况下,DFS在理想时间内只能得到解,得不到最优解。
该算法的效率及成功率很大程度上取决于递归深度的设定,若事先不知道理论深度,人为定义的最大递归深度与理论深度差距较大时,得到的解与最优解会相差极大,当设置的最大深度小于理论深度时甚至会无解。
那DFS是不是一无是处呢?
显然深度优先搜索最大的优势就是极低的空间复杂度,然而因为需要遍历的总量不多(去重后),这个特性在八数码问题上并没有显示出优势,不过可以为大规模数据运算提供另一种低成本的思路。
综上,在解决八数码问题上,DFS并不是一种优秀的算法。
实验记录
设置最大递归深度为32
| 实验样本 |
理论深度 |
寻找深度 |
遍历次数 |
耗时/s |
| “134-85726” |
7 |
31 |
203512 |
0.431 |
| “5674-8321” |
30 |
32 |
188739 |
0.352 |
| “-75168324” |
28 |
32 |
1867331 |
2.386 |
| “32841-567” |
29 |
31 |
871753 |
1.213 |
| “32-418567” |
30 |
32 |
1015214 |
1.511 |
Source Code
点击展开
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
| #include <iostream>
#include <string>
#include <vector>
#include <unordered_map>
#include <ctime>
using namespace std;
struct node {
string s;
int ptr;
};
const int maxDepth = 33;
int times = 0;
bool isFound = false;
node ori;
node des;
vector<node> stack;
unordered_map<string, bool> visited;
void dfs(node n, int count);
void init() {
ori.s = "5674-8321";
for (int i = 0; i < ori.s.length(); i++) {
if (ori.s[i] == '-') {
ori.ptr = i;
break;
}
}
des.s = "1238-4765";
des.ptr = 4;
stack.push_back(ori);
}
bool check(string s) {
int sum = 0;
for (int j = 0; j < s.length(); j++) {
for (int w = 0; w < j; w++) {
if (s[w] != '-' && s[j] != '-' && s[w] > s[j]) {
sum++;
}
}
}
if (sum % 2 == 0) {
return true;
}
else {
return false;
}
}
node swap(node& n, const int a, const int b) {
node next = n;
char temp = next.s[a];
next.s[a] = next.s[b];
next.s[b] = temp;
next.ptr = next.s[a] == '-' ? a : b;
return next;
}
bool isVisited(node& n) {
if (visited.count(n.s) == 0) {
return false;
}
return true;
}
void process(node& n, int arg, int count) {
node temp = swap(n, n.ptr, n.ptr + arg);
if (!isFound && !isVisited(temp) && count < maxDepth) {
stack.push_back(temp);
visited[temp.s] = true;
dfs(temp, count + 1);
stack.pop_back();
visited.erase(temp.s);
}
}
void up(node& n, int count) {
if (n.ptr - 3 >= 0) {
process(n, -3, count);
}
}
void down(node& n, int count) {
if (n.ptr + 3 <= 8) {
process(n, 3, count);
}
}
void left(node& n, int count) {
int ptr = n.ptr;
if (ptr != 0 && ptr != 3 && ptr != 6) {
process(n, -1, count);
}
}
void right(node& n, int count) {
int ptr = n.ptr;
if (ptr != 2 && ptr != 5 && ptr != 8) {
process(n, 1, count);
}
}
void show(node* n) {
cout << "Found" << endl;
int depth = 0;
for (auto it = stack.begin(); it != stack.end(); it++) {
cout << "--------- Depth = " << depth++ << endl;
for (int i = 0; i < 3; i++) {
for (int j = 0; j < 3; j++) {
cout << it->s[3 * i + j] << " ";
}
cout << endl;
}
}
}
void dfs(node n, int count) {
if (n.s == des.s) {
isFound = true;
show(&n);
return;
}
times++;
left(n, count);
up(n, count);
right(n, count);
down(n, count);
}
int main() {
clock_t start = clock();
init();
if (check(ori.s) != check(des.s)) {
cout << "No solution" << endl;
return 0;
}
dfs(ori, 0);
clock_t end = clock();
cout << "Total times = " << times << endl;
cout << "Total cost: " << (double)(end - start) / CLOCKS_PER_SEC << " second" << endl;
return 0;
}
|
A*
如何优化A*算法的效率?
采用曼哈顿距离(每个点当前位置与理想位置需移动步数之和)来代替不在理想位置的点的个数,可以得到更加准确的估值函数。
估值函数确定之后,剩下的就是通过Dijkstra来寻找最短路径的问题了。
需求如下:
- 储存每一个访问过的节点,以便回溯路径
- 对于每一个当前访问的点,与被访问过的所有点进行查重校检
- 对于队列中所有即将要访问的点,取出估值最小的点进行访问
方案如下:
- 队列与存储:建立一个队列用来储存所有的节点,用一个指针指向队头元素,每次循环使指针向后移动一位,保证指针始终指向当前访问节点。队列不执行pop操作,从队头到指针的所有元素全部保留在原位以便回溯。遍历得到的将要访问的结点从队尾压入队列。
- 查重校检:取队头直到当前元素建立哈希表查重(
unordered_map(C++11)),并且访问每一个结点后都将该节点的指针(节省内存)放入哈希表中。
- 估值:对每个状态进行估值并存储在状态结构体中,每个状态仅估值一次。
- 取最小值:对当前节点到队尾建立最小堆,有以下特性:
- 每次取堆顶节点即为最小值
- 每压入一个节点进行最小堆化
- 每次堆维护时间复杂度为$O(logN)$
- 堆建立在队列中,不额外占用内存
最终得到算法的时间复杂度为
$$
O(N+NlogN)
$$
空间复杂度为
$$
O(N)
$$
N为遍历的节点个数,通常小于$10^5$
通过优化的A*对样本进行测试,得到的实验结果令人欣喜,准确率与效率都非常高。
实验记录
| 实验样本 |
理论深度 |
寻找深度 |
遍历次数 |
耗时/s |
| “134-85726” |
7 |
7 |
9 |
0.051 |
| “5674-8321” |
30 |
30 |
5691 |
0.189 |
| “-75168324” |
28 |
28 |
8152 |
0.194 |
| “32841-567” |
29 |
29 |
12747 |
0.219 |
| “32-418567” |
30 |
30 |
18765 |
0.296 |
Source Code
点击展开
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
| #include <iostream>
#include <string>
#include <vector>
#include <algorithm>
#include <unordered_map>
#include <ctime>
#include <cmath>
using namespace std;
struct node {
string s;
int ptr, pre, F, depth;
};
node ori;
node des;
unordered_map<char, int> pos;
unordered_map<string, bool> visited;
vector<node> q;
int times = 0;
bool cmp(const node& a, const node& b) {
return a.F > b.F;
}
int H(node& n) {
int H = 0;
for (int i = 0; i < n.s.length(); i++) {
if (n.s[i] != des.s[i]) {
H += fabs(i % 3 - pos[n.s[i]] % 3) + fabs(i / 3 - pos[n.s[i]] / 3);
}
}
return H;
}
int F(node& n) {
return H(n) + n.depth;
}
bool check(string s) {
int sum = 0;
for (int j = 0; j < s.length(); j++) {
for (int w = 0; w < j; w++) {
if (s[w] != '-' && s[j] != '-' && s[w] > s[j]) {
sum++;
}
}
}
if (sum % 2 == 0) {
return true;
}
else {
return false;
}
}
void init() {
des.s = "1238-4765";
des.ptr = 4;
for (int i = 0; i < des.s.length(); i++) {
pos[des.s[i]] = i;
}
ori.s = "5674283-1";
for (int i = 0; i < ori.s.length(); i++) {
if (ori.s[i] == '-') {
ori.ptr = i;
break;
}
}
ori.pre = -1;
ori.depth = 0;
ori.F = F(ori);
}
bool isVisited(node& n) {
if (visited.count(n.s) == 0) {
return false;
}
return true;
}
node swap(node n, const int a, const int b) {
char temp = n.s[a];
n.s[a] = n.s[b];
n.s[b] = temp;
n.ptr = n.s[a] == '-' ? a : b;
n.depth++;
return n;
}
void process(int front, int arg) {
node temp = swap(q[front], q[front].ptr, q[front].ptr + arg);
temp.pre = front;
if (!isVisited(temp)) {
visited[temp.s] = true;
temp.F = F(temp);
q.push_back(temp);
push_heap(q.begin() + front + 1, q.end(), cmp);
}
}
void up(int front) {
if (q[front].ptr - 3 >= 0) {
process(front, -3);
}
}
void down(int front) {
if (q[front].ptr + 3 <= 8) {
process(front, 3);
}
}
void left(int front) {
int ptr = q[front].ptr;
if (ptr != 0 && ptr != 3 && ptr != 6) {
process(front, -1);
}
}
void right(int front) {
int ptr = q[front].ptr;
if (ptr != 2 && ptr != 5 && ptr != 8) {
process(front, 1);
}
}
void show(node& n) {
cout << "Found" << endl;
vector<node> ans;
while (n.pre != -1) {
ans.push_back(n);
n = q[n.pre];
}
ans.push_back(ori);
for (auto it = ans.rbegin(); it != ans.rend(); it++) {
printf("--------- Depth = %d, F = %d\n", it->depth, it->F);
for (int i = 0; i < 3; i++) {
for (int j = 0; j < 3; j++) {
cout << it->s[3 * i + j] << " ";
}
cout << endl;
}
}
cout << "Total times: " << times << endl;
}
int main() {
clock_t start = clock();
init();
if (check(ori.s) != check(des.s)) {
cout << "No solution" << endl;
return 0;
}
q.push_back(ori);
make_heap(q.begin(), q.end(), cmp);
for (int front = 0; front < q.size(); front++) {
times++;
if (q[front].s == des.s) {
show(q[front]);
break;
}
left(front);
up(front);
right(front);
down(front);
}
clock_t end = clock();
cout << "Total cost: " << (double)(end - start) / CLOCKS_PER_SEC << " second" << endl;
return 0;
}
|
八数码问题深度是否存在极限?
国际魔方协会认为打乱三阶魔方只需要精心计算的二十步,此时魔方处于“最混乱”的状态,任何操作都属于将魔方复原的第一步,因此魔方的“20”被称为“上帝之数”。
回到八数码问题,通过DFS输出深度大于某阈值的排列组合,我将阈值深度设置为100层,取1000个样本进行Astar查找,发现多数样本仅二十多步即可还原。步数最多的为30步,而且他们全部都有一个共同的特点——顺序上大致是目标状态的逆序。
曼哈顿距离
指所有节点当前位置到理想位置的距离的和
既然估值函数是通过曼哈顿距离来确定的,那曼哈顿距离最大的状态就是启发式算法极力避免去访问的节点,换句话说,曼哈顿距离最大的状态是不是最为“混乱”的状态呢?
两种状态:
- 先确保角上节点的距离:角节点为4,边界点为2,曼哈顿距离为24
- 所有节点平均:角节点和边界点均为3,曼哈顿距离为24
提出一个设想:
当曼哈顿距离达到24时,深度(可能)会达到30,那么30是否是深度的极限呢?
但实验结果表明两者并没有非常直接的关系,水平有限,暂无法从数学上给出证明。
想要知道答案,需要用BFS算法跑到第31层看一看。
在这里说一下我的代码中对于深度的定义:初始状态深度为0,每移动一次深度+1
在BFS中加入几行测试代码使程序输出所有深度大于等于30的状态:
1
2
3
4
|
if (q[front].depth >= 30) {
cout << q[front].s << " Depth = " << q[front].depth <<" H = "<<H(q[front])<< endl;
}
|
程序输出为:
点击展开
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
| 2874-6351 Depth = 30 H = 20
5426-8371 Depth = 30 H = 20
-47528361 Depth = 30 H = 22
-87456321 Depth = 30 H = 24
4875-6321 Depth = 30 H = 24
5486-7321 Depth = 30 H = 24
58-437621 Depth = 30 H = 22
54-678321 Depth = 30 H = 24
5416-8327 Depth = 30 H = 20
1874-6325 Depth = 30 H = 16
321458-67 Depth = 30 H = 14
32147856- Depth = 30 H = 14
187236-45 Depth = 30 H = 16
4675-1328 Depth = 30 H = 24
5314-8627 Depth = 30 H = 16
-21438567 Depth = 30 H = 14
5324-8671 Depth = 30 H = 16
5278-4361 Depth = 30 H = 16
3174-8526 Depth = 30 H = 16
5374-2681 Depth = 30 H = 20
5647-8123 Depth = 30 H = 16
564278-31 Depth = 30 H = 22
-67258341 Depth = 30 H = 24
6572-8341 Depth = 30 H = 24
7654-3821 Depth = 30 H = 16
5476-3821 Depth = 30 H = 20
421538-67 Depth = 30 H = 16
5647-2381 Depth = 30 H = 20
5647-3821 Depth = 30 H = 16
-43652781 Depth = 30 H = 16
5214-8367 Depth = 30 H = 16
3674-2581 Depth = 30 H = 20
5672-4381 Depth = 30 H = 22
541628-37 Depth = 30 H = 20
543672-81 Depth = 30 H = 20
54-632781 Depth = 30 H = 20
2614-8357 Depth = 30 H = 16
18-276345 Depth = 30 H = 16
18725634- Depth = 30 H = 20
-87216345 Depth = 30 H = 20
5612-8347 Depth = 30 H = 20
32-418567 Depth = 30 H = 14
58-467231 Depth = 30 H = 24
58-427361 Depth = 30 H = 22
8672-5341 Depth = 30 H = 20
5172-8346 Depth = 30 H = 20
2174-8356 Depth = 30 H = 16
3874-6521 Depth = 30 H = 20
-57684321 Depth = 30 H = 22
547638-21 Depth = 30 H = 24
5476-8231 Depth = 30 H = 24
7654-2381 Depth = 30 H = 20
765342-81 Depth = 30 H = 20
1672-8345 Depth = 30 H = 16
5472-8361 Depth = 30 H = 22
5476-8123 Depth = 30 H = 20
3274-8561 Depth = 30 H = 16
5276-8341 Depth = 30 H = 22
576328-41 Depth = 30 H = 24
5764-8231 Depth = 30 H = 24
5436-8721 Depth = 30 H = 16
58-367421 Depth = 30 H = 24
5683-7421 Depth = 30 H = 24
58741632- Depth = 30 H = 24
5674-8321 Depth = 30 H = 24
-47518326 Depth = 30 H = 22
5478-6321 Depth = 30 H = 22
57-846321 Depth = 30 H = 22
7658-4321 Depth = 30 H = 16
5876-4321 Depth = 30 H = 22
56724138- Depth = 30 H = 24
26745138- Depth = 30 H = 22
8674-5123 Depth = 30 H = 16
5476-2381 Depth = 30 H = 24
57-426381 Depth = 30 H = 24
5274-6381 Depth = 30 H = 22
57-436821 Depth = 30 H = 22
251368-47 Depth = 30 H = 18
37-462581 Depth = 30 H = 20
37246158- Depth = 30 H = 18
76534281- Depth = 30 H = 18
5764-2381 Depth = 30 H = 24
-76854123 Depth = 30 H = 16
76-854123 Depth = 30 H = 14
5634-2781 Depth = 30 H = 16
576248-31 Depth = 30 H = 24
568247-31 Depth = 30 H = 24
56-472381 Depth = 30 H = 24
-87546123 Depth = 30 H = 20
87-546123 Depth = 30 H = 18
3624-8571 Depth = 30 H = 16
562378-41 Depth = 30 H = 22
5673-2481 Depth = 30 H = 24
567432-81 Depth = 30 H = 24
527368-41 Depth = 30 H = 22
-51268347 Depth = 30 H = 20
32841756- Depth = 30 H = 16
-41528637 Depth = 30 H = 18
547268-31 Depth = 30 H = 24
568327-41 Depth = 30 H = 24
5874-6123 Depth = 30 H = 20
38-427516 Depth = 30 H = 18
5678-4123 Depth = 30 H = 16
8671-5324 Depth = 30 H = 16
765814-23 Depth = 30 H = 14
76581423- Depth = 30 H = 16
57-486231 Depth = 30 H = 24
5872-6341 Depth = 30 H = 24
57-386421 Depth = 30 H = 24
-21358467 Depth = 30 H = 16
56721834- Depth = 30 H = 24
65-874123 Depth = 30 H = 16
5871-6324 Depth = 30 H = 20
76583412- Depth = 30 H = 14
-54687123 Depth = 30 H = 18
-57618324 Depth = 30 H = 22
567284-31 Depth = 30 H = 22
54-687123 Depth = 30 H = 20
58-647321 Depth = 30 H = 24
7651-8324 Depth = 30 H = 16
7652-8341 Depth = 30 H = 20
46752138- Depth = 30 H = 24
5672-1348 Depth = 30 H = 24
-57641328 Depth = 30 H = 24
65742138- Depth = 30 H = 24
-47561328 Depth = 30 H = 24
52746138- Depth = 30 H = 22
765281-34 Depth = 30 H = 18
-65874123 Depth = 30 H = 14
38742651- Depth = 30 H = 20
76528134- Depth = 30 H = 20
-47568312 Depth = 30 H = 24
46758231- Depth = 30 H = 24
32-471568 Depth = 30 H = 16
86745231- Depth = 30 H = 22
65748231- Depth = 30 H = 24
54361278- Depth = 30 H = 16
-57628341 Depth = 30 H = 24
6574-8312 Depth = 30 H = 24
765834-12 Depth = 30 H = 16
5874-2361 Depth = 30 H = 22
58746231- Depth = 30 H = 24
5678-2341 Depth = 30 H = 22
56784231- Depth = 30 H = 22
5874-6312 Depth = 30 H = 24
-57648312 Depth = 30 H = 24
567382-41 Depth = 30 H = 24
-47586321 Depth = 30 H = 24
Total times: 181441
Total cost: 0.632 second
|
由结果可知并没有状态的深度可以大于30,且曼哈顿距离与深度的关系也并非简单的线性关系,这说明还有更为准确的算法可以对状态进行估值计算,最近时间有限不再深入研究。
现在有理由认为八数码问题的极限为移动30次。